Sound Analysis
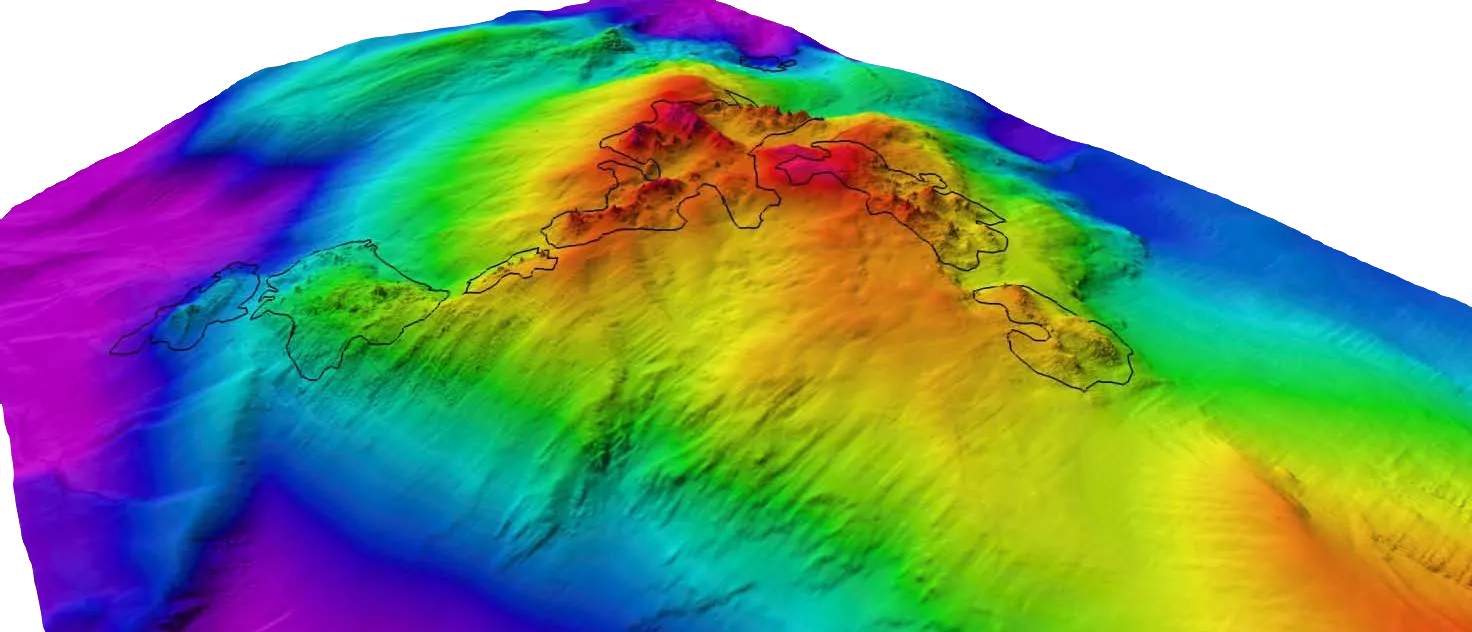
The client required a 3D reconstruction of the seafloor at approximately 1200m depth and with 0.2m grid resolution. This was to identify metal-rich chimneys and corroborate electromagnetic surveys of a subsea mining oppertunity.
A preliminary algorithm was expanded to fuse disparate sensor data files (e.g.: ship telemetry; ship-based ROV sonar positioning; ROV IMUs; ROV multibeam sonar; and CTD). Code efficiency and file handling were improved to allow processing large datasets. Meanwhile, parameters were tuned to increase the quality of outputs. Implementation was in MATLAB, alongside a GIS package for rendering results.
Overall, the mission’s ROV telemetry and seafloor bathymetry were established, while the data processing workflow was refined for future analyses.